








一、DP5000系列动力定位控制系统 (DP)
能够实现动力定位控制系统(DP)的设计生产制造及售后服务一体化,并能成功应用于商用海工船舶,在全球为数不多。
能够提供高质量的动力定位控制系统综合解决方案的可靠供应商更是屈指可数。
DP5000 系统是基于船舶一个数学模型,它将船舶的运动描述为所受力的函数。应用船舶模型来获得船舶位置、航向和速度的无噪声估计值。该模型中使用了大量的参数,如船舶质量、吃水、船型、推进器类型和布置位置、上层建筑和位置等。
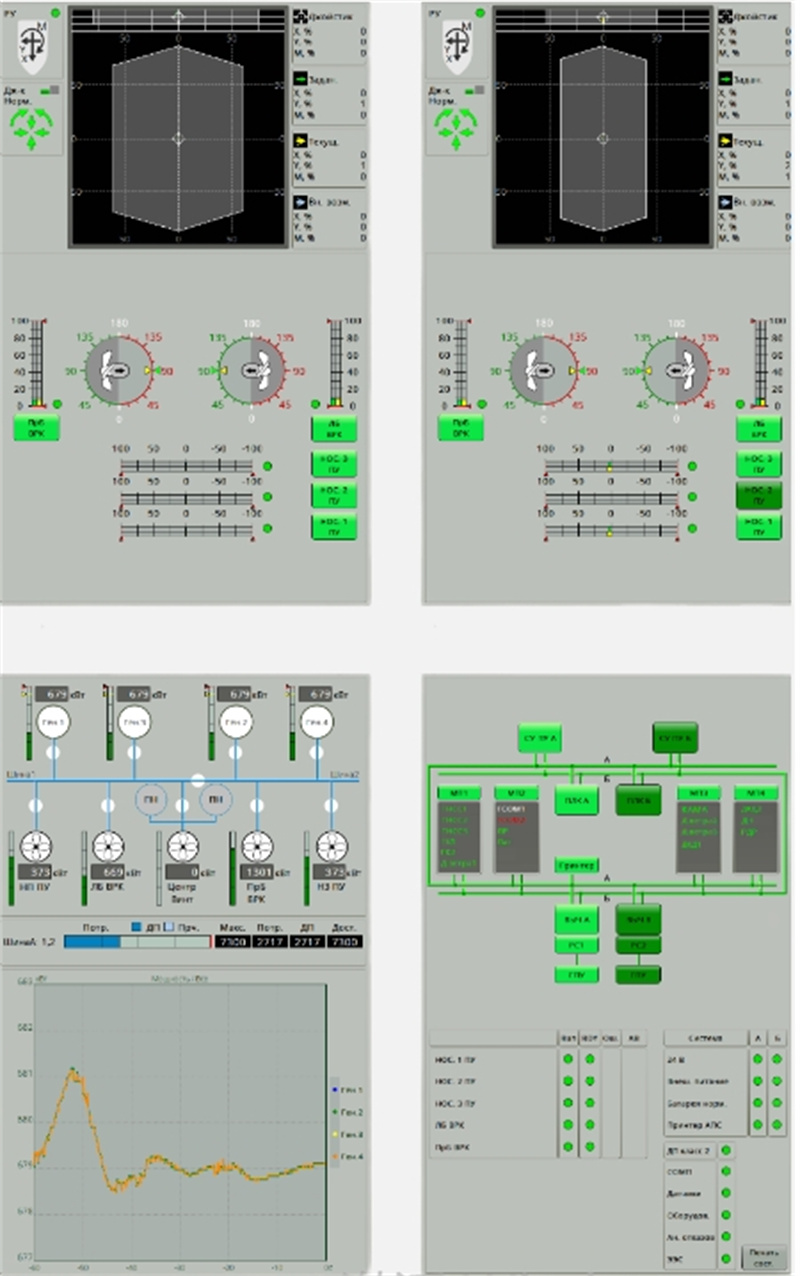
动力定位控制系统实时的根据从船舶传感器、位置参考传感器接收到的数据,决定船舶相应的控制模式并对执行机构发送控制命令实现船舶所期望的定位位置。
实现控制的主要模式如下:
手动操纵杆控制
自动船舶艏向控制
自动船舶位置控制
操纵杆/自动混合控制
速度矢量控制
低速/高速跟踪控制
最小功率模式
设定区域保持控制模式
其它模式和功能可用于特殊工况应用,如电缆铺设,交通疏浚,管道铺设,起重机操作等。
二、DP 铺缆操作介绍
DP5000 系统针对国内外铺缆需求,定制开发了独特的DP铺缆功能,通过功能强大的内置数学模型及外部铺缆相关数据的获取,来实现更安全有效的铺缆操作。
DP铺缆操作主要包括如下几个特性:
自动跟踪铺缆模式
与拉力传感器接口获取实时数据
与铺缆系统接口获取实时数据
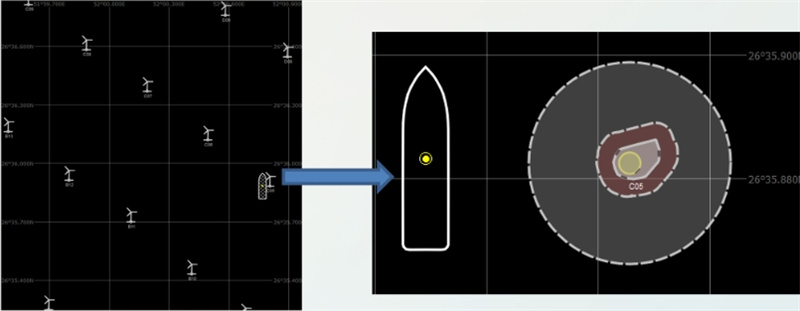
拖曳埋设犁的远程触地点的设定功能
拉力监测和自动降速功能
另外,还可以实现与海洋物体地图的叠加功能,在铺设电缆时实时观测周围环境。